Если элементарное перемещение d записать в виде:
По II закону Ньютона:
Величина называется кинетической энергией
Работа равнодействующей всех сил действующих на частицу равна изменению кинетической энергии частицы.
или другая запись
кинетический диссипативный скалярный физический
Если A > 0, то WК возрастает (падения)
Если A > 0, то WК убывает (бросание).
Движущиеся тела обладают способностью выполнять работу и в том случае, если никакие силы со стороны других тел на них не действуют. Если тело движется с постоянной скоростью, то - сумма всех сил действующих на тело равна 0 и работа при этом не совершается. Если тело будет действовать с некоторой силой по направлению движения на другое тело, тогда оно способно совершить работу. В соответствии с ІІІ законом Ньютона к движущемуся телу будет приложена такая же по величине сила, но направленная в противоположную сторону. Благодаря действию этой силы скорость тела будет уменьшаться до его полной остановки. Энергия WК, обусловленная движением тела, называется кинетической. Полностью остановившееся тело не может совершить работы. WК зависит от скорости и массы тела. Изменение направления скорости не влияет на кинетическую энергию.
Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
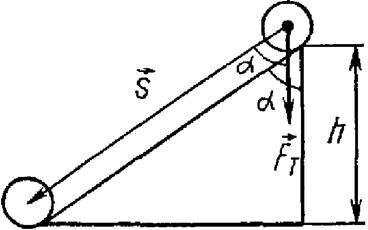
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.
Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .
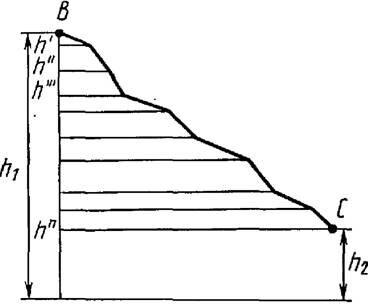
Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:

Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
С понятием работы тесно связано другое фундаментальное физическое понятие – понятие энергии. Поскольку в механике изучается, во-первых, движение тел, а во-вторых, взаимодействие тел между собой, то принято различать два вида механической энергии: кинетическую энергию , обусловленную движением тела, и потенциальную энергию , обусловленную взаимодействием тела с другими телами.
Кинетической энергией механической системы называют энергию, з ависящую от скоростей движения точек этой системы.
Выражение для кинетической энергии можно найти, определив работу равнодействующей силы, приложенной к материальной точке. На основании (2.24) запишем формулу для элементарной работы равнодействующей силы:
Так
как
 ,
то
dА
= mυdυ.
(2.25)
,
то
dА
= mυdυ.
(2.25)
Чтобы найти работу равнодействующей силы при изменении скорости тела от υ 1 до υ 2 проинтегрируем выражение (2.29):
 (2.26)
(2.26)
Так как работа - мера передачи энергии от одного тела другому, то на
основании
(2.30) запишем, что величина
 есть
кинетическая энергия
есть
кинетическая энергия
тела:
 откуда
вместо (1.44) получаем
откуда
вместо (1.44) получаем
 (2.27)
(2.27)
Теорему, выраженную формулой (2.30) принято называть теоремой о кинетической энергии . В соответствии с ней работа сил, действующих на тело (или систему тел), равна изменению кинетической энергии этого тела (или системы тел).
Из теоремы о кинетической энергии следует физический смысл кинетической энергии : кинетическая энергия тела равна работе, которую оно способно совершать в процессе уменьшения своей скорости до нуля. Чем больше «запас» кинетической энергии у тела, тем большую работу оно способно совершить.
Кинетическая энергия системы равна сумме кинетических энергий материальных точек, из которых эта система состоит:
 (2.28)
(2.28)
Если работа всех сил, действующих на тело, положительна, то кинетическая энергия тела возрастает, если работа отрицательна, то кинетическая энергия убывает.
Очевидно, что элементарная работа равнодействующей всех приложенных к телу сил будет равна элементарному изменению кинетической энергии тела:
dА = dЕ к. (2.29)
В заключение заметим, что кинетическая энергия, как и скорость движения, имеет относительный характер. Например, кинетическая энергия пассажира, сидящего в поезде, будет разной, если рассматривать движение относительно полотна дороги или относительно вагона.
§2.7 Потенциальная энергия
Вторым видом механической энергии является потенциальная энергия – энергия, обусловленная взаимодействием тел.
Потенциальная энергия характеризует не любое взаимодействие тел, а лишь такое, которое описывается силами, не зависящими от скорости. Большинство сил (сила тяжести, сила упругости, гравитационные силы и т.д.) именно таковы; исключением являются лишь силы трения. Работа рассматриваемых сил не зависит от формы траектории, а определяется лишь её начальным и конечным положением. Работа таких сил на замкнутой траектории равна нулю.
Силы, работа которых не зависит от формы траектории, а зависит лишь от начального и конечного положения материальной точки (тела) называют потенциальными или консервативными силами .
Если тело взаимодействует со своим окружением посредством потенциальных сил, то для характеристики этого взаимодействия можно ввести понятие потенциальной энергии.
Потенциальной называют энергию, обусловленную взаимодействием тел и зависящую от их взаимного расположения.
Найдем потенциальную энергию тела, поднятого над землей. Пусть тело массой m равномерно перемещается в гравитационном поле из положения 1 в положение 2 по поверхности, сечение которой плоскостью чертежа показано на рис. 2.8. Это сечение является траекторией материальной точки (тела). Если трение отсутствует, то на точку действуют три силы:
1) сила N со стороны поверхности нормально поверхности, работа этой силы равна нулю;
2) сила тяжести mg, работа этой силы А 12 ;
3) сила тяги F со стороны некоторого движущего тела (двигатель внутреннего сгорания, электродвигатель, человек и т. п.); работу этой силы обозначим А T .
Рассмотрим работу силы тяжести при перемещении тела вдоль наклонной плоскости длиной ℓ (рис. 2.9). Как видно из этого рисунка, работа равна
А" = mgℓ соsα = mgℓ соs(90° + α) = - mgℓ sinα
Из треугольника ВСD имеем ℓ sinα = h, поэтому из последней формулы следует:
Траекторию движения тела (см. рис. 2.8) можно схематично представить небольшими участками наклонной плоскости, поэтому для, работы силы тяжести на всей траектории 1 -2 справедливо выражение
A 12 =mg (h 1 -h 2) =-(mg h 2 - mg h 1) (2.30)
Итак, работа силы тяжести не зависит от траектории тела, а зависит от различия в высотах расположения начальной и конечной точек траектории.
Величину
е п = mg h (2.31)
называют потенциальной энергией материальной точки (тела) массой m поднятой над землей на высоту h. Следовательно, формулу (2.30) можно переписать так:
A 12 = =-(En 2 - En 1) или A 12 = =-ΔEn (2.32)
Работа силы тяжести равна взятому с обратным знаком изменению потенциальной энергии тел, т. е. разности ее конечного и начального значений (теорема о потенциальной энергии ).
Подобные рассуждения можно привести и для упруго деформированного тела.
 (2.33)
(2.33)
Отметим, что физический смысл имеет разность потенциальных энергий как величина, определяющая работу консервативных сил. В связи с этим безразлично, какому положению, конфигурации, следует приписать нулевую потенциальную энергию.
Из теоремы о потенциальной энергии можно получить одно очень важное следствие: консервативные силы всегда направлены в сторону уменьшения потенциальной энергии. Установленная закономерность проявляется в том, что любая система, предоставленная самой себе, всегда стремится перейти в такое состояние, в котором её потенциальная энергия имеет наименьшее значение. В этом заключается принцип минимума потенциальной энергии .
Если система в данном состоянии не обладает минимальной потенциальной энергией, то это состояние называют энергетически невыгодным .
Если шарик находится на дне вогнутой чаши (рис.2.10,а), где его потенциальная энергия минимальна (по сравнению с ее значениями в соседних положениях), то его состояние более выгодно. Равновесие шарика в этом случае является устойчивым : если сместить шарик в сторону и отпустить, то он снова возвратится в своё первоначальное положение.
Энергетически невыгодным, например, является положение шарика на вершине выпуклой поверхности (рис.2.10, б). Сумма сил, действующих при этом на шарик, равна нулю, и потому, этот шарик будет находится в равновесии. Однако равновесие это является неустойчивым : достаточно малейшего воздействия, чтобы он скатился вниз и тем самым перешёл в состояние энергетически более выгодное, т.е. обладающее меньшей
п отенциальной
энергией.
отенциальной
энергией.
При безразличном равновесии (рис. 2.10, в) потенциальная энергия тела равна потенциальной энергии всех его возможных ближайших состояний.
На рисунке 2.11 можно указать некоторую ограниченную область пространства (например cd), в которой потенциальная энергия меньше, чем вне её. Эта область получила название потенциальной ямы .
В этом параграфе никакие новые сведения не сообщаются, но подчеркиваются и разъясняются некоторые важные особенности потенциальной энергии, на которые следует обратить внимание.
Потенциальная энергия - энергия взаимодействия тел
Важно отчетливо представлять себе, что кинетическая энергия - величина, относящаяся к одному телу, а потенциальная энергия - это всегда энергия взаимодействия по меньшей мере двух тел (или частей одного тела) друг с другом. Понятие потенциальной энергии относится к системе тел, а не к одному телу. Если в системе имеется несколько тел, то полная потенциальная энергия системы равна сумме потенциальных энергий всех пар взаимодействующих тел (любое тело взаимодействует с каждым из остальных).
Рис. 6.15
Потенциальная энергия характеризует взаимодействие тел именно потому, что само понятие силы всегда относится к двум телам: к телу, на которое действует сила, и к телу, со стороны которого она действует.
При получении выражения для кинетической энергии мы не использовали эту особенность силы, сразу заменив ее в формуле для работы произведением массы на ускорение согласно второму закону Ньютона. Именно поэтому понятие кинетической энергии относится к одному телу.
Выражение же для потенциальной энергии мы получили с помощью известной зависимости сил от расположения взаимодействующих тел, не используя уравнения движения. Равенство А = -АЕр определяет потенциальную энергию безотносительно к уравнениям движения. Поэтому потенциальная энергия является просто другой характеристикой (наряду с силой) взаимного действия тел друг на друга.
Часто при выводе формулы, связывающей изменение потенциальной энергии с работой сил, одно из тел системы принимают за неподвижное. Так, когда рассматривают падение тела на Землю под действием силы тяжести, то смещением Земли при этом пренебрегают. Поэтому работа сил взаимодействия между Землей и телом сводится к работе только одной силы, действующей на тело.
Или другой пример. Сжатая или растянутая пружина, действующая на тело, обычно закреплена одним концом, и этот конец пружины не перемещается (фактически он скреплен с земным шаром). Работу совершает при этом лишь сила упругости деформированной пружины, приложенная к телу.
Из-за этого потенциальную энергию системы двух тел привыкают рассматривать как энергию одного тела. Это может привести к путанице.
В действительности во всех случаях справедливо следующее утверждение: изменение потенциальной энергии двух тел, взаимодействующих с силами, зависящими только от расстояния между телами, равно работе этих сил, взятой со знаком минус:
A = F12- Аг, + F21 ¦ Аг2 = ~ = -АЕр. (6.7.1)
Здесь F12 - сила, действующая на тело 1 со стороны тела 2, а F21 - сила, действующая на тело 2 со стороны тела 1 (рис. 6.15).
Нулевой уровень потенциальной энергии
Согласно уравнению (6.7.1) работа сил взаимодействия определяет не саму потенциальную энергию, а ее изменение.
Поскольку работа определяет лишь изменение потенциальной энергии, то только изменение энергии в механике имеет физический смысл. Поэтому можно произвольно выбрать со-стояние системы, в котором ее потенциальная энергия считается равной нулю. Этому состоянию соответствует нулевой уровень потенциальной энергии. Ни одно явление в природе или технике не определяется значением самой потенциальной энергии. Важна лишь разность значений потенциальной энергии в конечном и начальном состояниях системы тел.
Выбор нулевого уровня производится по-разному и диктуется исключительно соображениями удобства, т. е. простотой записи уравнения, выражающего закон сохранения энергии. Обычно в качестве состояния с нулевой потенциальной энергией выбирают состояние системы с минимальной энергией. Тогда потенциальная энергия всегда положительна.
У пружины потенциальная энергия минимальна в отсутствие деформации, а у камня - когда он лежит на поверхности
2
Земли. Поэтому в первом случае Ер = ^i^L (рис. 6.16), а во втором случае Ер = mgh (рис. 6.17). Но к данным выражениям можно добавить любую постоянную величину С, и это ничего
2
не изменит. Можно считать, что Е = ^^ + С и Е = mgh + С.
г Д Р
Если во втором случае положить С = -mgh0, то это будет означать, что за нулевой уровень энергии принята энергия на высоте hQ над поверхностью Земли.
О
h
м
о о
Иногда невозможно выбрать нулевой уровень потенциальной энергии так, чтобы минимальная энергия равнялась нулю. Так, например, потенци-альную энергию двух тел, взаимодей-ствующих посредством сил всемирного тяготения, можно записать так:
m-i т.* -G-
+ С. Рис. 6.18
При г -» 0 первое слагаемое стремится к -°о. Поэтому минимальное значение энергии можно считать равным нулю лишь при С = °о. Но пользоваться уравнениями, в которые входит бесконечная величина, разумеется, нельзя. Поэтому здесь удобнее положить С = О и тем самым за нулевой уровень принять потенциальную энергию в состоянии, когда тела бесконечно удалены друг от друга (г = °о). Тогда нулевому уровню будет соответствовать не минимальная энергия, а максимальная. При любом конечном значении г потенциальная энергия отрицательна (рис. 6.18).
Независимость потенциальной энергии от выбора системы отсчета
Заметим еще раз, что понятие потенциальной энергии имеет смысл для таких систем, в которых силы взаимодействия консервативны, т. е. зависят лишь от расстояния между телами или их частями. Соответственно и потенциальная энергия зависит от расстояния между телами или их частями: от высоты камня над поверхностью Земли, от длины пружины, от рас-стояния между точечными телами. От координат тел потенци-альная энергия непосредственно не зависит. (Лишь постольку, поскольку расстояния являются функциями координат, можно говорить о зависимости от координат.) Отсюда следует очень важный вывод, на который обычно не обращают внимания. Так как расстояния во всех системах отсчета, движущихся и неподвижных, одни и те же, потенциальная энергия не зависит от выбора системы отсчета.
Но как же это может быть? Ведь АЕр = -А, а работа зависит от выбора системы отсчета. Вот здесь-то и проявляется отчетливо тот факт, что потенциальная энергия есть энергия взаимодействия двух тел, а ее изменение определяется работой сил, действующих на оба тела. При переходе от неподвижной системы к движущейся меняются работы обеих сил, но суммарная работа остается неизменной. В самом деле, если в некоторой системе отсчета за время At совершается работа
А1 = $12 " + ^21 " А?2"
то в другой системе, движущейся относительно первой, работа равна
А2 = F12 (Дгі + Аг0) + F21 (Аг2 + Лг0),
где Аг0 - перемещение систем отсчета друг относительно друга за время At.
Так как по третьему закону Ньютона F12 = ~F21, то
F12 ¦ Ar0 + F2j Ar0 = 0. Следовательно, At = A2.
Различия между потенциальной и кинетической энергией
Кинетическая энергия зависит только от скоростей тел, а потенциальная - только от расстояний между ними.
Далее, положительная работа внутренних сил всегда приводит к увеличению кинетической энергии, но обязательно уменьшает энергию потенциальную:
AEk=A, но АЕр = -А.
Кинетическая энергия всегда положительна, а потенциальная энергия может быть как положительной, так и отрицательной.
Изменение кинетической энергии всегда равно работе действующих на тело сил, а изменение потенциальной энергии равно (со знаком минус) работе только консервативных сил (но не сил трения, зависящих от скорости).
И потенциальная и кинетическая энергии являются функциями состояния системы, т. е. они точно опреде-лены, если известны координаты и скорости всех тел системы.
Энергия – скалярная величина. В системе СИ единицей измерения энергии является Джоуль.
Кинетическая и потенциальная энергия
Различают два вида энергии – кинетическую и потенциальную.
ОПРЕДЕЛЕНИЕ
Кинетическая энергия – это энергия, которой тело обладает вследствие своего движения:
ОПРЕДЕЛЕНИЕ
Потенциальная энергия – это энергия, которая определяется взаимным расположением тел, а также характером сил взаимодействия между этими телами.
Потенциальная энергия в поле тяготения Земли – это энергия, обусловленная гравитационным взаимодействием тела с Землей. Она определяется положением тела относительно Земли и равна работе по перемещению тела из данного положения на нулевой уровень:
Потенциальная энергия – энергия, обусловленная взаимодействием частей тела друг с другом. Она равна работе внешних сил по растяжению (сжатию) недеформированной пружины на величину :
Тело может одновременно обладать и кинетической, и потенциальной энергией.
Полная механическая энергия тела или системы тел равна сумме кинетической и потенциальной энергий тела (системы тел):
Закон сохранения энергии
Для замкнутой системы тел справедлив закон сохранения энергии:
В случае, когда на тело (или систему тел) действуют внешние силы, например, закон сохранения механической энергии не выполняется. В этом случае изменение полной механической энергии тела (системы тел) равно внешних сил:
Закон сохранения энергии позволяет установить количественную связь между различными формами движения материи. Так же, как и , он справедлив не только для , но и для всех явлений природы. Закон сохранения энергии говорит о том, что в энергию в природе нельзя уничтожить так же, как и создать из ничего.
В наиболее общем виде закон сохранения энергии можно сформулировать так:
- энергия в природе не исчезает и не создается вновь, а только превращается из одного вида в другой.
Примеры решения задач
ПРИМЕР 1
| Задание | Пуля, летящая со скоростью 400 м/с, попадает в земляной вал и проходит до остановки 0,5 м. Определить сопротивление вала движению пули, если ее масса 24 г. |
| Решение | Сила сопротивления вала – это внешняя сила, поэтому работа этой силы равна изменению кинетической энергии пули:
Так как сила сопротивления вала противоположна направлению движения пули, работа этой силы: Изменение кинетической энергии пули: Таким образом, можно записать: откуда сила сопротивления земляного вала: Переведем единицы в систему СИ: г кг. Вычислим силу сопротивления: |
| Ответ | Сила сопротивления вала 3,8 кН. |
ПРИМЕР 2
| Задание | Груз массой 0,5 кг падает с некоторой высоты на плиту массой 1 кг, укрепленную на пружине с коэффициентом жесткости 980 Н/м. Определить величину наибольшего сжатия пружины, если в момент удара груз обладал скоростью 5 м/с. Удар неупругий. |
| Решение | Запишем для замкнутой системы груз+плита. Так как удар неупругий, имеем:
откуда скорость плиты с грузом после удара:
По закону сохранения энергии полная механическая энергия груза вместе с плитой после удара равна потенциальной энергии сжатой пружины: |
